
The 42131 set features a remote-controlled Cat D11 Bulldozer using the new Powered UP system. Compared to the 42100 Liebherr R 9800 Excavator from last year, it uses only one hub and four motors yet controls six functions. This is achieved via a clever gearbox, which uses one motor to power four functions, the other serving as control of the gearbox. While this can be seen as a step back in playability, it is certainly much more interesting in terms of pure mechanics, which is why the set was a “must have” for me and is my first Powered UP set. Designing an alternate for this set served two objectives: test and get familiar with the new Powered UP system (notably in comparison with the Mindstorm framework) and implement a gearbox-driven functional model.
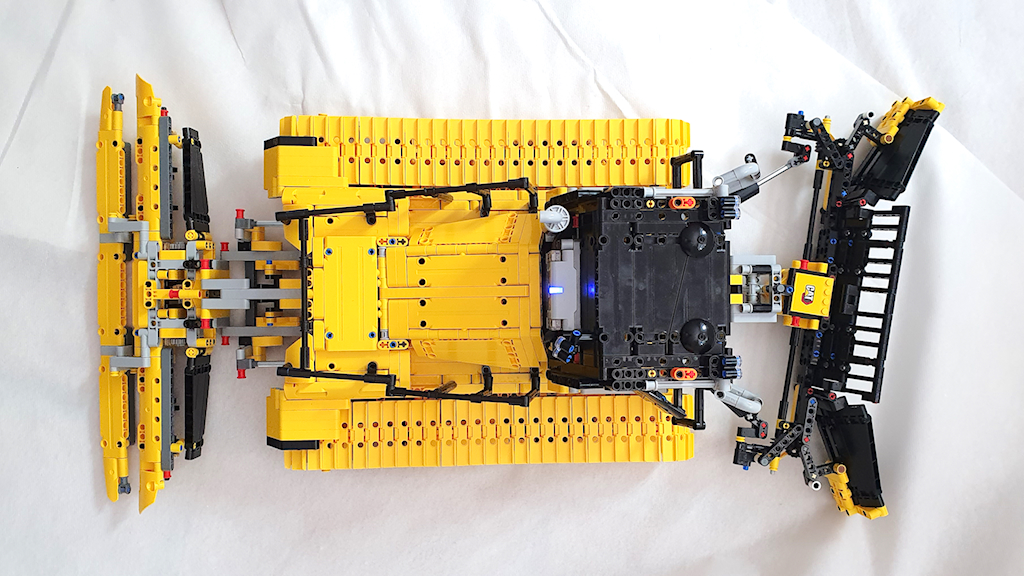
There are not that many tracked vehicles… I opted for a snow groomer, as the control of the blade offers interesting mechanical possibilities. It uses three of the four non-driving functions: raising, tiling and opening of the blade. The two first are controlled by mechanical LAs, while the last one uses a classical wormscrew mechanism. The fourth function is used to raise the tiler. The two XL motors are used for driving/steering, like in the original model. They drive an L86 fake engine, as well as the tiler’s rotation. The tiler can be detached. The cabin can tilt and the hood open, giving access to the hub (to change batteries) and the fake engine.
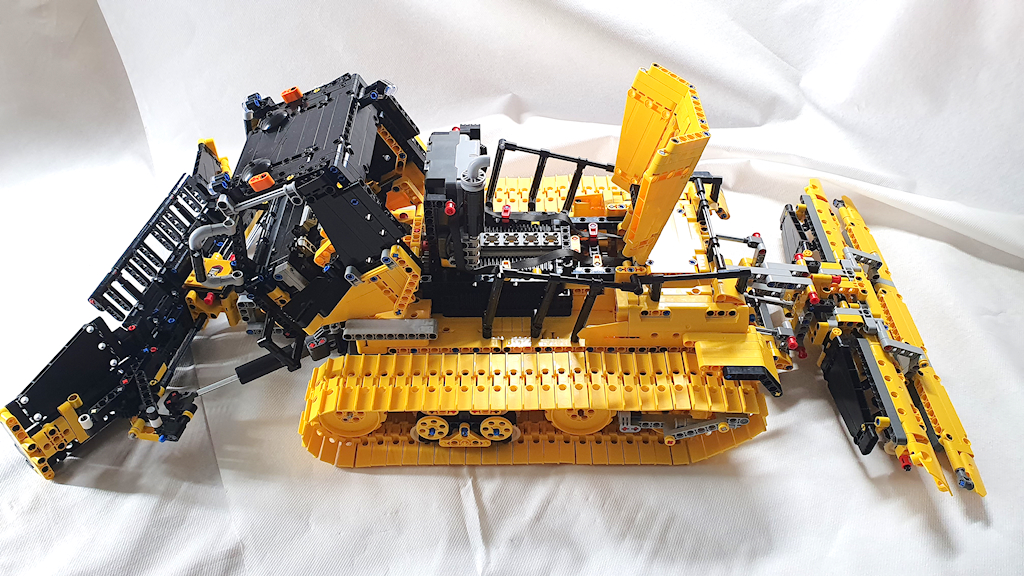
I tried to reproduce the design of a snow groomer as closely as possible (and yes, there are some yellow ones, even though they may not be the most frequent!). There are safety rails and housing, as well as a curved blade. Only the tracks are too narrow compared to a real-life groomer; they would extend much more inward. The cabin has a fully equipped interior, lights, mirrors, and opening doors.

I programmed a simple interface with the official Powered UP app. It allows to drive the model and activate each function individually. When selecting one of the four non-driving functions, the gear selector is first put in the right position, which requires the servomotor to “remember” in which position it is. This is particularly challenging, in particular when the hub is switched off, as the motor could be moved manually. A calibration procedure is therefore needed. To implement such a calibration, a stop is built so that the gearbox cannot go from position 4 to 1. When the program is started, the motor moves the changeover to position 1 and records the position (which is set at angle 0 internally). This is not a calibration per se, as done in official lego interfaces, but it does the job!

My conclusions regarding the Powered UP system: a convergence between the classical Power Functions and Mindstorm system is more than welcome. Yet the app is, as of today, far too limited. The documentation is virtually absent, and one has to rely on third-party tutorials that get quickly outdated. It is also impossible to save and share programs. As such, Powered UP models rely on existing dedicated interfaces that may not be maintained in the future. This does not encourage building new models with this system, which is disappointing. Hopefully, this will change in the future, and the polyvalence of the programming interface will develop to match that of the bricks themselves.
Photo gallery: https://bricksafe.com/pages/jyd80/42131-snowgroomer
Instructions available at Rebrickable: https://rebrickable.com/mocs/MOC-130579/alter-lego/42131-alternate-snow-groomer/